
Článek navazuje na předchozí návod na stavbu ovládacího pultu k digitální modelové železnici “Arduino TCO – ovládací pult s Arduinem na XperssNet“. Při provozu kolejiště, jsem si uvědomil, že především ovládání pro menší děti je až moc složité. Bylo potřeba nějaké jednoduché zařízení, které by jim pomohlo sestavit celou průjezdnou trasu vlaku nebo třeba jen část trasy pro průjezd stanicí, či navedení soupravy z příjezdové koleje na správnou kolej ve stanici. Hardware byl již hotový, stačilo tedy jen promyslet vhodnou formu software.
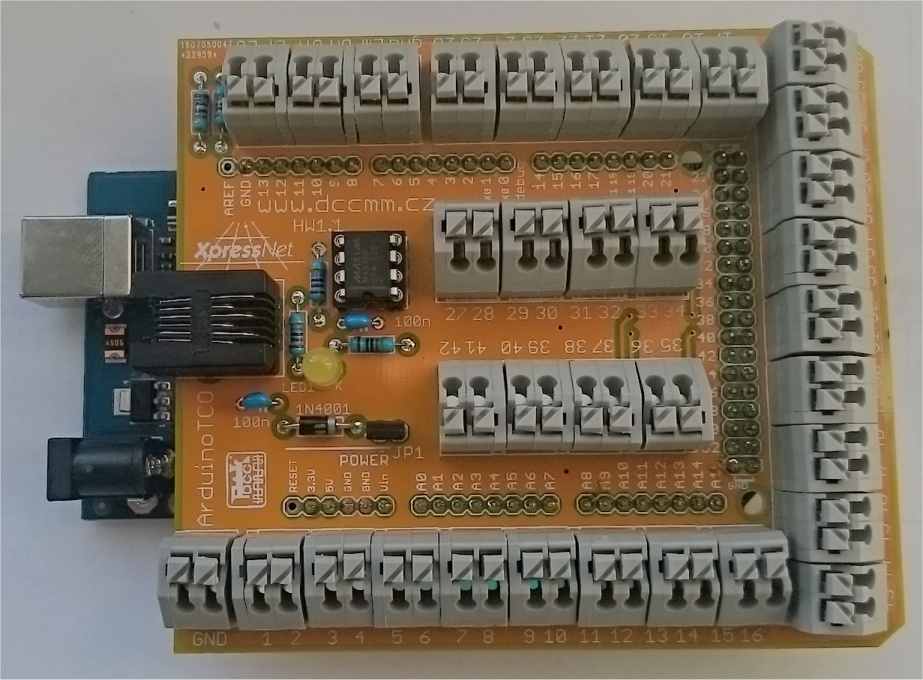
Sestavené Arduino TCO na desce
Jak už bylo zmíněno v popisu článku, software je určený pro universální desku Arduino TCO, jejíž postup stavby a oživení je popsán v tomto článku – Arduino TCO – ovládací pult s Arduinem na XperssNet. Připravil jsem dvě základní verze. První obsahuje možnost zadání 10 cest a ovládat nezáviste příslušenství na 50 tlačítkách (například 25 výměn). Dále pak na desce jsou zachována tlačítka pro ovládání stavu provozu a nouzového zastavení. Druhá verze programu je jen upravena na počet 30 cest a 30 samostatných tlačítek. Délka cest je teoreticky možná až v rozsahu maximální velikosti paměti kontroléru, ale nedokážu si takovou cestu představit  a tak jsem velikost volbou proměnné omezil na 127 příkazů v cestě.
a tak jsem velikost volbou proměnné omezil na 127 příkazů v cestě.
Fungování je jednoduché, v programu se přiřadí adresa dekodéru výměny a směr přehození. Po zvolení cesty patřičným tlačítkem dojde k postupnému odesílání příkazů. Čas mezi příkazy se dá v programu také změnit. To je z důvodu, aby nedošlo k přetížení centrály, k čemuž by mohlo dojít pokud by začalo vše najednou přestavovat (především u přestavníku s větším odběrem). Také je program nastaven tak, že další volby budou prováděny až po dokončení předchozí, to by opět mělo zabránit přetěžování centrály, ale je třeba si uvědomit, že provedení velice dlouhé cesty bude nějakou dobu trvat a v této době nebude možné volit jiné volby.
Nyní si ukážeme jak se nastavují jednotlivé proměnné v programu a začneme zopakováním si pro základní tlačítka ovládající příslušenství.
|
1 2 3 4 5 6 7 8 9 10 |
#define waiting 200 // doba sepnuti vystupu (ms) #define w_sekvence 20 // doba mezi prehozenim dalsi vyhybky ve vlakove ceste (ms) // buttons number 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 // realy pins 54, 55, 56, 57, 58, 59, 60, 61, 62, 63, 64, 65, 66, 67, 68, 69, 17, 16, 15, 14, 3, 4, 5, 6, 7, 8, 22, 24, 26, 28, 30, 32, 36, 34, 44, 42, 40, 38, 46, 48, 50, 52, 53, 51, 49, 47, 45, 43, 41, 39, 37, 35, 33, 31, 29, 27, 25, 23, 21, 20 // realne piny arduina zmena mozna v "buttonPins" byte addresses[]={ 1, 1, 2, 2, 3, 3, 4, 4, 5, 5, 6, 6, 7, 7, 8, 8, 9, 9, 10, 10, 11, 11, 12, 12, 13, 13, 14, 14, 15, 15, 16, 16, 17, 17, 18, 18, 19, 19, 20, 20, 21, 21, 22, 22, 23, 23, 24, 24, 25, 25}; // adresa dekoderu boolean turn[]={ 1, 0, 1, 0, 1, 0, 1, 0, 1, 0, 1, 0, 1, 0, 1, 0, 1, 0, 1, 0, 1, 0, 1, 0, 1, 0, 1, 0, 1, 0, 1, 0, 1, 0, 1, 0, 1, 0, 1, 0, 1, 0, 1, 0, 1, 0, 1, 0, 1, 0}; // realce vyhybky rovne/odbocka boolean mode[]={ 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1}; // mod reakce (pulzni nebo stiskovej) // 1-pulzni 0-podle delky drzeni |
Zde je hned úvodní část programu, kde si nastavujeme potřebné údaje. Ty jsou pro lepší orientaci pod sebou ve sloupcích.
“buttons number” – označení pinu na plošném spoji pro připojení tlačítka
“byte addresses” – adresa dekodéru výměn/příslušenství (výstupu) v systému DCC (číslo odpovídá adrese v systému)
“boolean turn” – volba směru přehození (rovně nebo do odbočky)
“boolean mode” – zde je možné zvolit chování reakce tlačítka v systému, zda se chová pulzně nebo dle délky držení tlačítka (to je vhodné třeba pokud máme na nějaké dekodéru nastaveno na výstupu ovládání např. závor. Tedy dokud držím, mám závory dole – sepnutý výstup).
Délku pulzu je možné změnit v proměnné “#define waiting” , výchozí hodnota 200 je 200ms (0.2s což pro běžný dekodér je dostatečné)
Pokud si to tedy shrneme máme nastaveno takto:
– vstup prvního tlačítka je nastaven na adresu “1” stav rovně “1” a pulzní stav “1“
– vstup druhého tlačítka je nastaven na adresu “1” stav odbočka “0” a pulzní stav “1“
– vstup třetího tlačítka je nastaven na adresu “2” stav rovně “1” a pulzní stav “1“
– vstup čtvrtého tlačítka je nastaven na adresu “2” stav odbočka “0” a pulzní stav “1“
– atd. …. až do tlačítka 50 (nebo 30 u programu s počtem cest 30)
Nyní se můžeme podívat na způsob zadávání cest do programu:
|
1 2 3 4 5 6 7 8 9 10 11 |
// adresa vyhybky (1-255), volba smeru (0 nebo 1),, maximalni počet vyhybek v jedne ceste 127 byte cesta1[]={ 21, 1, 20, 0, 13, 0, 10, 1, 27, 0, 21, 1, 8, 1}; byte cesta2[]={ 6, 1, 7, 0, 8, 1, 9, 1}; byte cesta3[]={ 1, 1, 2, 0, 3, 0, 4, 1}; byte cesta4[]={ 1, 1, 2, 0, 3, 0, 4, 1, 5, 1, 6, 1}; byte cesta5[]={ 1, 1, 2, 0, 3, 0, 4, 1}; byte cesta6[]={ 1, 1, 2, 0, 3, 0, 4, 1, 5}; byte cesta7[]={ 1, 1, 2, 0, 3, 0}; byte cesta8[]={ 1, 1, 2, 0, 3, 0}; byte cesta9[]={}; // priklad kdyz se cesta nepouzije byte cesta10[]={ 1, 1, 2, 0, 3, 0, 4, 1}; |
Již ze zápisu je patrné fungování, každá řádka je jedna cesta. Zapisuje se vždy adresa následovaná směrem přehození.
Hodnoty v první cestě tedy určují – adresa 21 a stav rovně, adresa 20 a stav do odbočky, adresa 13 a stav do odbočky ….. takto pokračuje až do konce na poslední zápis – adresa 8 a stav rovně.
Pokud nechcete cestu použít, necháte mezi závorky prázdné místo bez zápisu. Tak jako v cestě 9.
První cesta je pak ovládána tlačítkem 51 a dalších 9 nasleduje. U verze která ovládá 30 cest, pak první cesta začíná na tlačítku 31 a další následují.
Zde pak je verze pro 10 cest, na konci článku je možné stáhnout jako INO soubor pro Arduino.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 274 275 276 277 278 279 280 281 282 283 284 285 286 287 288 289 290 291 292 293 294 295 296 297 298 299 300 301 302 303 304 305 306 307 308 309 310 311 312 313 314 315 316 317 318 319 320 321 322 323 324 325 326 327 328 329 330 331 332 333 334 335 336 337 338 339 340 341 342 343 344 345 346 347 348 349 350 351 352 353 354 355 356 357 358 359 360 361 362 363 364 365 366 367 368 369 370 371 372 373 374 375 376 377 378 379 380 381 382 383 384 385 386 387 388 389 390 391 392 393 394 395 396 397 398 399 400 401 402 403 404 405 406 407 408 409 410 411 412 413 414 415 416 417 418 419 420 421 422 423 424 425 426 427 428 429 430 431 432 433 434 435 436 437 438 439 440 441 442 443 444 445 446 447 448 449 450 451 452 453 454 455 456 457 458 459 460 461 462 463 464 465 466 467 468 469 |
/* * TCO PULT V0.30b * * Ovladaní příslušenství pomocí pultu s tlačítky připojeného na XpressNet (V0.30 s podporou vlakové cesty) * * by BorgMcz site: http://www.dccmm.cz * license GPLv2 * * Library: Arduino RBD Button Library Example v2.1.0, by Alex Taujenis - https://github.com/alextaujenis/RBD_Button * Arduino Timer Library v1.2.0, by Alex Taujenis - https://github.com/alextaujenis/RBD_Timer * XpressNet slave, pgahtow.de by Philipp Gahtow - http://sourceforge.net/projects/pgahtow/files/Arduino%20%28v1.0%29%20libaries/XpressNet.zip * * V0.1 - test and debug default function * V0.2 - new definition this data * V0.21 - funkce malloc a zjednoduseni cyklu * V0.30 - verze s moznosti cesty * */ #define waiting 200 // doba sepnuti vystupu #define w_sekvence 20 // doba mezi prehozenim dalsi vyhybky ve vlakove ceste // buttons number 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 // realy pins 54, 55, 56, 57, 58, 59, 60, 61, 62, 63, 64, 65, 66, 67, 68, 69, 17, 16, 15, 14, 3, 4, 5, 6, 7, 8, 22, 24, 26, 28, 30, 32, 36, 34, 44, 42, 40, 38, 46, 48, 50, 52, 53, 51, 49, 47, 45, 43, 41, 39, 37, 35, 33, 31, 29, 27, 25, 23, 21, 20 // realne piny arduina zmena mozna v "buttonPins" byte addresses[]={ 1, 1, 2, 2, 3, 3, 4, 4, 5, 5, 6, 6, 7, 7, 8, 8, 9, 9, 10, 10, 11, 11, 12, 12, 13, 13, 14, 14, 15, 15, 16, 16, 17, 17, 18, 18, 19, 19, 20, 20, 21, 21, 22, 22, 23, 23, 24, 24, 25, 25}; // adresa dekoderu boolean turn[]={ 1, 0, 1, 0, 1, 0, 1, 0, 1, 0, 1, 0, 1, 0, 1, 0, 1, 0, 1, 0, 1, 0, 1, 0, 1, 0, 1, 0, 1, 0, 1, 0, 1, 0, 1, 0, 1, 0, 1, 0, 1, 0, 1, 0, 1, 0, 1, 0, 1, 0}; // realce vyhybky rovne/odbocka boolean mode[]={ 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1}; // mod reakce (pulzni nebo stiskovej) // 1-pulzni 0-podle delky drzeni // adresa vyhybky (1-255), volba smeru (0 nebo 1),, maximalni počet vyhybek v jedne ceste 127 byte cesta1[]={ 21, 1, 20, 0, 13, 0, 10, 1, 15, 1, 16, 1, 27, 0, 21, 1, 8, 1}; byte cesta2[]={ 6, 1, 7, 0, 8, 1, 9, 1}; byte cesta3[]={ 1, 1, 2, 0, 3, 0, 4, 1}; byte cesta4[]={ 1, 1, 2, 0, 3, 0, 4, 1, 5, 1, 6, 1}; byte cesta5[]={ 1, 1, 2, 0, 3, 0, 4, 1}; byte cesta6[]={ 1, 1, 2, 0, 3, 0, 4, 1, 5}; byte cesta7[]={ 1, 1, 2, 0, 3, 0}; byte cesta8[]={ 1, 1, 2, 0, 3, 0}; byte cesta9[]={}; // priklad kdyz se cesta nepouzije byte cesta10[]={ 1, 1, 2, 0, 3, 0, 4, 1}; #include <RBD_Timer.h> #include <RBD_Button.h> #define NO_OBJECTS 60 // realny pocet tlacitek ktera se pouziji, musi se pocitat i vynechana RBD::Button *bouncer = (RBD::Button*)malloc(NO_OBJECTS * sizeof(RBD::Button)); unsigned int buttonPins[NO_OBJECTS] = {54,55,56,57,58,59,60,61,62,63,64,65,66,67,68,69,17,16,15,14,3,4,5,6,7,8,22,24,26,28,30,32,36,34,44,42,40,38,46,48,50,52,53,51,49,47,45,43,41,39,37,35,33,31,29,27,25,23,21,20}; #include <XpressNet.h> XpressNetClass XpressNet; // XpressNet address: must be in range of 1-31; must be unique. Note that some IDs // are currently used by default, like 2 for a LH90 or LH100 out of the box, or 30 // for PC interface devices like the XnTCP. #define XNetAddress 26 // Adresse im XpressNet #define XNetSRPin 2 // Max485 Busdriver Send/Receive-PIN // rucni zapis, tlacitka ovladani napajeni RBD::Button buttonOn(10); // power ON RBD::Button buttonOff(11); // power OFF RBD::Button buttonEme(9); // power Emergency unsigned int StateOld; boolean ledState = 0; unsigned long previousMillis = 0; // will store last time LED was updated #define interval 500 // interval snimani stavu DCC const int LEDC = 12; // pin cervene ledky const int LEDZ = 13; // pin zelene ledky // #if defined(__AVR_ATmega1280__) || defined(__AVR_ATmega2560__) #define SerialDEBUG 0 //For Serial Port Debugging (Arduino Mega only) , 0 znamena vypnuti debugingu #define WaitingDEBUG 0 // //#endif #if SerialDEBUG // nastaveni vystupu pro debuging unsigned int printRam = 8; #include <SoftwareSerial.h> SoftwareSerial Debug(0, 1); // RX, TX #endif void setup() { for(int i = 0; i < NO_OBJECTS; i++){ bouncer[i] = RBD::Button(buttonPins[i]); } pinMode(LEDC,OUTPUT); // nastaveni vystupu ledek a test pinMode(LEDZ,OUTPUT); digitalWrite(LEDC,HIGH); digitalWrite(LEDZ,HIGH); delay(800); digitalWrite(LEDC,LOW); digitalWrite(LEDZ,LOW); #if SerialDEBUG Debug.begin(115200); Debug.println("Start TCO"); #endif XpressNet.start(XNetAddress, XNetSRPin); //inicializace XNet-Bus } byte XAddress; void loop() { //zde toto se bude opakovat podle poctu tlacitek max. 60 XpressNet.receive(); //permernet update the library for (int x = 0; x < 50; x++) { if(bouncer[x].onPressed()) { XAddress = (addresses[x] - 1); if(turn[x] == 1) { sendGfunction(); if (mode[x] != 0) { delay(waiting); sendGfunctionOff(); } else { while (bouncer[x].onReleased()==false) {} sendGfunctionOff(); } } else { sendRfunction(); if (mode[x] != 0) { delay(waiting); sendRfunctionOff(); } else { while (bouncer[x].onReleased()==false) {} sendRfunctionOff(); } } } } // cyklus pro poslednich 10 tlacitek urcujici vlakovou cestu if (bouncer[50].onPressed()) { // sestaveni cesty 1 int len = sizeof(cesta1); #if WaitingDEBUG delay(500); Debug.print(" delka cesty: "); Debug.println(len); #endif if (len > 0) { byte z = 0; for (byte x = 0; x < (len/2); x++) { XAddress = (cesta1[z] - 1); z++; #if WaitingDEBUG Debug.print(" "); Debug.print(XAddress);Debug.print("-");Debug.println(cesta1[z]); #endif if(cesta1[z] == 1) { sendGfunction(); delay(waiting); sendGfunctionOff(); } else { sendRfunction(); delay(waiting); sendRfunctionOff(); } z++; delay(w_sekvence); } } else { #if WaitingDEBUG delay(500); Debug.println("Prazdna cesta"); #endif } } if (bouncer[51].onPressed()) { // sestaveni cesty 2 int len = sizeof(cesta2); if (len > 0) { byte z = 0; for (byte x = 0; x < (len/2); x++) { XAddress = (cesta2[z] - 1); z++; if(cesta2[z] == 1) { sendGfunction(); delay(waiting); sendGfunctionOff(); } else { sendRfunction(); delay(waiting); sendRfunctionOff(); } z++; delay(w_sekvence); } } } if (bouncer[52].onPressed()) { // sestaveni cesty 3 int len = sizeof(cesta3); if (len > 0) { byte z = 0; for (byte x = 0; x < (len/2); x++) { XAddress = (cesta3[z] - 1); z++; if(cesta3[z] == 1) { sendGfunction(); delay(waiting); sendGfunctionOff(); } else { sendRfunction(); delay(waiting); sendRfunctionOff(); } z++; delay(w_sekvence); } } } if (bouncer[53].onPressed()) { // sestaveni cesty 4 int len = sizeof(cesta4); if (len > 0) { byte z = 0; for (byte x = 0; x < (len/2); x++) { XAddress = (cesta4[z] - 1); z++; if(cesta4[z] == 1) { sendGfunction(); delay(waiting); sendGfunctionOff(); } else { sendRfunction(); delay(waiting); sendRfunctionOff(); } z++; delay(w_sekvence); } } } if (bouncer[54].onPressed()) { // sestaveni cesty 5 int len = sizeof(cesta5); if (len > 0) { byte z = 0; for (byte x = 0; x < (len/2); x++) { XAddress = (cesta5[z] - 1); z++; if(cesta5[z] == 1) { sendGfunction(); delay(waiting); sendGfunctionOff(); } else { sendRfunction(); delay(waiting); sendRfunctionOff(); } z++; delay(w_sekvence); } } } if (bouncer[55].onPressed()) { // sestaveni cesty 6 int len = sizeof(cesta6); if (len > 0) { byte z = 0; for (byte x = 0; x < (len/2); x++) { XAddress = (cesta6[z] - 1); z++; if(cesta6[z] == 1) { sendGfunction(); delay(waiting); sendGfunctionOff(); } else { sendRfunction(); delay(waiting); sendRfunctionOff(); } z++; delay(w_sekvence); } } } if (bouncer[56].onPressed()) { // sestaveni cesty 7 int len = sizeof(cesta7); if (len > 0) { byte z = 0; for (byte x = 0; x < (len/2); x++) { XAddress = (cesta7[z] - 1); z++; if(cesta7[z] == 1) { sendGfunction(); delay(waiting); sendGfunctionOff(); } else { sendRfunction(); delay(waiting); sendRfunctionOff(); } z++; delay(w_sekvence); } } } if (bouncer[57].onPressed()) { // sestaveni cesty 8 int len = sizeof(cesta8); if (len > 0) { byte z = 0; for (byte x = 0; x < (len/2); x++) { XAddress = (cesta8[z] - 1); z++; if(cesta8[z] == 1) { sendGfunction(); delay(waiting); sendGfunctionOff(); } else { sendRfunction(); delay(waiting); sendRfunctionOff(); } z++; delay(w_sekvence); } } } if (bouncer[58].onPressed()) { // sestaveni cesty 9 int len = sizeof(cesta9); if (len > 0) { byte z = 0; for (byte x = 0; x < (len/2); x++) { XAddress = (cesta9[z] - 1); z++; if(cesta9[z] == 1) { sendGfunction(); delay(waiting); sendGfunctionOff(); } else { sendRfunction(); delay(waiting); sendRfunctionOff(); } z++; delay(w_sekvence); } } } if (bouncer[59].onPressed()) { // sestaveni cesty 10 int len = sizeof(cesta10); if (len > 0) { byte z = 0; for (byte x = 0; x < (len/2); x++) { XAddress = (cesta10[z] - 1); z++; if(cesta10[z] == 1) { sendGfunction(); delay(waiting); sendGfunctionOff(); } else { sendRfunction(); delay(waiting); sendRfunctionOff(); } z++; delay(w_sekvence); } } } // snimani tlacitek ovladani stavu DCC if(buttonOn.onPressed()) { XpressNet.setPower(csNormal); #if SerialDEBUG Debug.println("Button 100 Normal run"); #endif } if(buttonOff.onPressed()) { XpressNet.setPower(csTrackVoltageOff); #if SerialDEBUG Debug.println("Button 101 Track Voltage Off"); #endif } if(buttonEme.onPressed()) { XpressNet.setPower(csEmergencyStop); #if SerialDEBUG Debug.println("Button 102 Emergency Stop"); #endif } unsigned long currentMillis = millis(); if(currentMillis - previousMillis > interval) { previousMillis = currentMillis; notifyXNetPower (XpressNet.getPower()); } } //-------------------------------------------------------------------------------------------- void notifyXNetPower (uint8_t State){ #if SerialDEBUG if (State != StateOld) { Debug.print("Power: "); Debug.println(State); StateOld = State; } #endif switch (State) { case csNormal: // Debug.println("ON"); digitalWrite(LEDC,LOW); // sviti zelena digitalWrite(LEDZ,HIGH); break; case csTrackVoltageOff: // Debug.println("OFF"); digitalWrite(LEDC,HIGH); // sviti cervena digitalWrite(LEDZ,LOW); break; case csEmergencyStop: // Debug.println("EmStop"); ledState = !ledState; // blika zelena digitalWrite(LEDC,LOW); digitalWrite(LEDZ,ledState); break; case csShortCircuit: // Debug.println("SHORT"); ledState = !ledState; // blika cervena digitalWrite(LEDZ,LOW); digitalWrite(LEDC,ledState); break; case csServiceMode: // Debug.println("PROG"); digitalWrite(LEDZ,LOW); // sviti cervena digitalWrite(LEDC,HIGH); break; case 255: // Debug.println("ERROR"); ledState = !ledState; // blikaji obe digitalWrite(LEDZ,ledState); digitalWrite(LEDC,ledState); break; default: // Debug.println("OTHER"); ledState = !ledState; // blika cervena digitalWrite(LEDZ,LOW); digitalWrite(LEDC,ledState); break; } } void sendGfunction() { XpressNet.setTrntPos(0, XAddress, B1000); #if SerialDEBUG Debug.print("Button Green ON, Address: "); Debug.println(XAddress); #endif } void sendGfunctionOff() { XpressNet.setTrntPos(0, XAddress, B0000); #if SerialDEBUG Debug.println("Button Green OFF"); #endif } void sendRfunction() { XpressNet.setTrntPos(0, XAddress, B1001); #if SerialDEBUG Debug.print("Button Red ON, Address: "); Debug.println(XAddress); #endif } void sendRfunctionOff() { XpressNet.setTrntPos(0, XAddress, B0001); #if SerialDEBUG Debug.println("Button Red OFF"); #endif } //-------------------------------------------------------------------------------------------- //-------------------------------------------------------------------------------------------- #if SerialDEBUG int freeRam () { extern int __heap_start, *__brkval; int v; return (int) &v - (__brkval == 0 ? (int) &__heap_start : (int) __brkval); } #endif |
a následuje verze pro 30 cest, na konci článku je možné stáhnout jako INO soubor pro Arduino.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 274 275 276 277 278 279 280 281 282 283 284 285 286 287 288 289 290 291 292 293 294 295 296 297 298 299 300 301 302 303 304 305 306 307 308 309 310 311 312 313 314 315 316 317 318 319 320 321 322 323 324 325 326 327 328 329 330 331 332 333 334 335 336 337 338 339 340 341 342 343 344 345 346 347 348 349 350 351 352 353 354 355 356 357 358 359 360 361 362 363 364 365 366 367 368 369 370 371 372 373 374 375 376 377 378 379 380 381 382 383 384 385 386 387 388 389 390 391 392 393 394 395 396 397 398 399 400 401 402 403 404 405 406 407 408 409 410 411 412 413 414 415 416 417 418 419 420 421 422 423 424 425 426 427 428 429 430 431 432 433 434 435 436 437 438 439 440 441 442 443 444 445 446 447 448 449 450 451 452 453 454 455 456 457 458 459 460 461 462 463 464 465 466 467 468 469 470 471 472 473 474 475 476 477 478 479 480 481 482 483 484 485 486 487 488 489 490 491 492 493 494 495 496 497 498 499 500 501 502 503 504 505 506 507 508 509 510 511 512 513 514 515 516 517 518 519 520 521 522 523 524 525 526 527 528 529 530 531 532 533 534 535 536 537 538 539 540 541 542 543 544 545 546 547 548 549 550 551 552 553 554 555 556 557 558 559 560 561 562 563 564 565 566 567 568 569 570 571 572 573 574 575 576 577 578 579 580 581 582 583 584 585 586 587 588 589 590 591 592 593 594 595 596 597 598 599 600 601 602 603 604 605 606 607 608 609 610 611 612 613 614 615 616 617 618 619 620 621 622 623 624 625 626 627 628 629 630 631 632 633 634 635 636 637 638 639 640 641 642 643 644 645 646 647 648 649 650 651 652 653 654 655 656 657 658 659 660 661 662 663 664 665 666 667 668 669 670 671 672 673 674 675 676 677 678 679 680 681 682 683 684 685 686 687 688 689 690 691 692 693 694 695 696 697 698 699 700 701 702 703 704 705 706 707 708 709 710 711 712 713 714 715 716 717 718 719 720 721 722 723 724 725 726 727 728 729 730 731 732 733 734 735 736 737 738 739 740 741 742 743 744 745 746 747 748 749 750 751 752 753 754 755 756 757 758 759 760 761 762 763 764 765 766 767 768 769 770 771 772 773 774 775 776 777 778 779 780 781 782 783 784 785 786 787 788 789 790 791 792 793 794 795 796 797 798 799 800 801 802 803 804 805 806 807 808 809 810 811 812 813 814 815 816 817 818 819 820 821 822 823 824 825 826 827 828 829 830 831 832 833 834 835 836 837 838 839 840 841 842 843 844 845 846 847 848 849 850 851 852 853 854 855 856 857 858 859 860 861 862 863 864 865 866 867 868 869 870 871 872 873 |
/* * TCO PULT V0.30b 30 cest * * Ovladaní příslušenství pomocí pultu s tlačítky připojeného na XpressNet (V0.30 s podporou vlakové cesty) * * by BorgMcz site: http://www.dccmm.cz * license GPLv2 * * Library: Arduino RBD Button Library Example v2.1.0, by Alex Taujenis - https://github.com/alextaujenis/RBD_Button * Arduino Timer Library v1.2.0, by Alex Taujenis - https://github.com/alextaujenis/RBD_Timer * XpressNet slave, pgahtow.de by Philipp Gahtow - http://sourceforge.net/projects/pgahtow/files/Arduino%20%28v1.0%29%20libaries/XpressNet.zip * * V0.1 - test and debug default function * V0.2 - new definition this data * V0.21 - funkce malloc a zjednoduseni cyklu * V0.30 - verze s moznosti cesty * */ #define waiting 200 // doba sepnuti vystupu #define w_sekvence 20 // doba mezi prehozenim dalsi vyhybky ve vlakove ceste // buttons number 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 // realy pins 54, 55, 56, 57, 58, 59, 60, 61, 62, 63, 64, 65, 66, 67, 68, 69, 17, 16, 15, 14, 3, 4, 5, 6, 7, 8, 22, 24, 26, 28, 30, 32, 36, 34, 44, 42, 40, 38, 46, 48, 50, 52, 53, 51, 49, 47, 45, 43, 41, 39, 37, 35, 33, 31, 29, 27, 25, 23, 21, 20 // realne piny arduina zmena mozna v "buttonPins" byte addresses[]={ 1, 1, 2, 2, 3, 3, 4, 4, 5, 5, 6, 6, 7, 7, 8, 8, 9, 9, 10, 10, 11, 11, 12, 12, 13, 13, 14, 14, 15, 15}; // adresa dekoderu boolean turn[]={ 1, 0, 1, 0, 1, 0, 1, 0, 1, 0, 1, 0, 1, 0, 1, 0, 1, 0, 1, 0, 1, 0, 1, 0, 1, 0, 1, 0, 1, 0}; // realce vyhybky rovne/odbocka boolean mode[]={ 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1}; // mod reakce (pulzni nebo stiskovej) // 1-pulzni 0-podle delky drzeni // adresa vyhybky (1-255), volba smeru (0 nebo 1),, maximalni počet vyhybek v jedne ceste 127 byte cesta1[]={ 21, 1, 20, 0, 13, 0, 10, 1, 15, 1, 16, 1, 27, 0, 21, 1, 8, 1}; byte cesta2[]={ 6, 1, 7, 0, 8, 1, 9, 1}; byte cesta3[]={ 1, 1, 2, 0, 3, 0, 4, 1}; byte cesta4[]={ 1, 1, 2, 0, 3, 0, 4, 1, 5, 1, 6, 1}; byte cesta5[]={ 1, 1, 2, 0, 3, 0, 4, 1}; byte cesta6[]={ 1, 1, 2, 0, 3, 0, 4, 1, 5}; byte cesta7[]={ 1, 1, 2, 0, 3, 0}; byte cesta8[]={ 1, 1, 2, 0, 3, 0}; byte cesta9[]={}; // priklad kdyz se cesta nepouzije byte cesta10[]={}; byte cesta11[]={}; byte cesta12[]={}; byte cesta13[]={}; byte cesta14[]={}; byte cesta15[]={}; byte cesta16[]={}; byte cesta17[]={}; byte cesta18[]={}; byte cesta19[]={}; byte cesta20[]={}; byte cesta21[]={}; byte cesta22[]={}; byte cesta23[]={}; byte cesta24[]={}; byte cesta25[]={}; byte cesta26[]={}; byte cesta27[]={}; byte cesta28[]={}; byte cesta29[]={}; byte cesta30[]={}; #include <RBD_Timer.h> #include <RBD_Button.h> #define NO_OBJECTS 60 // realny pocet tlacitek ktera se pouziji, musi se pocitat i vynechana RBD::Button *bouncer = (RBD::Button*)malloc(NO_OBJECTS * sizeof(RBD::Button)); unsigned int buttonPins[NO_OBJECTS] = {54,55,56,57,58,59,60,61,62,63,64,65,66,67,68,69,17,16,15,14,3,4,5,6,7,8,22,24,26,28,30,32,36,34,44,42,40,38,46,48,50,52,53,51,49,47,45,43,41,39,37,35,33,31,29,27,25,23,21,20}; #include <XpressNet.h> XpressNetClass XpressNet; // XpressNet address: must be in range of 1-31; must be unique. Note that some IDs // are currently used by default, like 2 for a LH90 or LH100 out of the box, or 30 // for PC interface devices like the XnTCP. #define XNetAddress 26 // Adresse im XpressNet #define XNetSRPin 2 // Max485 Busdriver Send/Receive-PIN // rucni zapis, tlacitka ovladani napajeni RBD::Button buttonOn(10); // power ON RBD::Button buttonOff(11); // power OFF RBD::Button buttonEme(9); // power Emergency unsigned int StateOld; boolean ledState = 0; unsigned long previousMillis = 0; // will store last time LED was updated #define interval 500 // interval snimani stavu DCC const int LEDC = 12; // pin cervene ledky const int LEDZ = 13; // pin zelene ledky // #if defined(__AVR_ATmega1280__) || defined(__AVR_ATmega2560__) #define SerialDEBUG 0 //For Serial Port Debugging (Arduino Mega only) , 0 znamena vypnuti debugingu #define WaitingDEBUG 0 // //#endif #if SerialDEBUG // nastaveni vystupu pro debuging unsigned int printRam = 8; #include <SoftwareSerial.h> SoftwareSerial Debug(0, 1); // RX, TX #endif void setup() { for(int i = 0; i < NO_OBJECTS; i++){ bouncer[i] = RBD::Button(buttonPins[i]); } pinMode(LEDC,OUTPUT); // nastaveni vystupu ledek a test pinMode(LEDZ,OUTPUT); digitalWrite(LEDC,HIGH); digitalWrite(LEDZ,HIGH); delay(800); digitalWrite(LEDC,LOW); digitalWrite(LEDZ,LOW); #if SerialDEBUG Debug.begin(115200); Debug.println("Start TCO"); #endif XpressNet.start(XNetAddress, XNetSRPin); //inicializace XNet-Bus } byte XAddress; void loop() { //zde toto se bude opakovat podle poctu tlacitek max. 60 XpressNet.receive(); //permernet update the library for (int x = 0; x < 30; x++) { if(bouncer[x].onPressed()) { XAddress = (addresses[x] - 1); if(turn[x] == 1) { sendGfunction(); if (mode[x] != 0) { delay(waiting); sendGfunctionOff(); } else { while (bouncer[x].onReleased()==false) {} sendGfunctionOff(); } } else { sendRfunction(); if (mode[x] != 0) { delay(waiting); sendRfunctionOff(); } else { while (bouncer[x].onReleased()==false) {} sendRfunctionOff(); } } } } // cyklus pro poslednich 30 tlacitek urcujici vlakovou cestu if (bouncer[30].onPressed()) { // sestaveni cesty 1 int len = sizeof(cesta1); if (len > 0) { byte z = 0; for (byte x = 0; x < (len/2); x++) { XAddress = (cesta1[z] - 1); z++; if(cesta1[z] == 1) { sendGfunction(); delay(waiting); sendGfunctionOff(); } else { sendRfunction(); delay(waiting); sendRfunctionOff(); } z++; delay(w_sekvence); } } } if (bouncer[31].onPressed()) { // sestaveni cesty 2 int len = sizeof(cesta2); if (len > 0) { byte z = 0; for (byte x = 0; x < (len/2); x++) { XAddress = (cesta2[z] - 1); z++; if(cesta2[z] == 1) { sendGfunction(); delay(waiting); sendGfunctionOff(); } else { sendRfunction(); delay(waiting); sendRfunctionOff(); } z++; delay(w_sekvence); } } } if (bouncer[32].onPressed()) { // sestaveni cesty 3 int len = sizeof(cesta3); if (len > 0) { byte z = 0; for (byte x = 0; x < (len/2); x++) { XAddress = (cesta3[z] - 1); z++; if(cesta3[z] == 1) { sendGfunction(); delay(waiting); sendGfunctionOff(); } else { sendRfunction(); delay(waiting); sendRfunctionOff(); } z++; delay(w_sekvence); } } } if (bouncer[33].onPressed()) { // sestaveni cesty 4 int len = sizeof(cesta4); if (len > 0) { byte z = 0; for (byte x = 0; x < (len/2); x++) { XAddress = (cesta4[z] - 1); z++; if(cesta4[z] == 1) { sendGfunction(); delay(waiting); sendGfunctionOff(); } else { sendRfunction(); delay(waiting); sendRfunctionOff(); } z++; delay(w_sekvence); } } } if (bouncer[34].onPressed()) { // sestaveni cesty 5 int len = sizeof(cesta5); if (len > 0) { byte z = 0; for (byte x = 0; x < (len/2); x++) { XAddress = (cesta5[z] - 1); z++; if(cesta5[z] == 1) { sendGfunction(); delay(waiting); sendGfunctionOff(); } else { sendRfunction(); delay(waiting); sendRfunctionOff(); } z++; delay(w_sekvence); } } } if (bouncer[35].onPressed()) { // sestaveni cesty 6 int len = sizeof(cesta6); if (len > 0) { byte z = 0; for (byte x = 0; x < (len/2); x++) { XAddress = (cesta6[z] - 1); z++; if(cesta6[z] == 1) { sendGfunction(); delay(waiting); sendGfunctionOff(); } else { sendRfunction(); delay(waiting); sendRfunctionOff(); } z++; delay(w_sekvence); } } } if (bouncer[36].onPressed()) { // sestaveni cesty 7 int len = sizeof(cesta7); if (len > 0) { byte z = 0; for (byte x = 0; x < (len/2); x++) { XAddress = (cesta7[z] - 1); z++; if(cesta7[z] == 1) { sendGfunction(); delay(waiting); sendGfunctionOff(); } else { sendRfunction(); delay(waiting); sendRfunctionOff(); } z++; delay(w_sekvence); } } } if (bouncer[37].onPressed()) { // sestaveni cesty 8 int len = sizeof(cesta8); if (len > 0) { byte z = 0; for (byte x = 0; x < (len/2); x++) { XAddress = (cesta8[z] - 1); z++; if(cesta8[z] == 1) { sendGfunction(); delay(waiting); sendGfunctionOff(); } else { sendRfunction(); delay(waiting); sendRfunctionOff(); } z++; delay(w_sekvence); } } } if (bouncer[38].onPressed()) { // sestaveni cesty 9 int len = sizeof(cesta9); if (len > 0) { byte z = 0; for (byte x = 0; x < (len/2); x++) { XAddress = (cesta9[z] - 1); z++; if(cesta9[z] == 1) { sendGfunction(); delay(waiting); sendGfunctionOff(); } else { sendRfunction(); delay(waiting); sendRfunctionOff(); } z++; delay(w_sekvence); } } } if (bouncer[39].onPressed()) { // sestaveni cesty 10 int len = sizeof(cesta10); if (len > 0) { byte z = 0; for (byte x = 0; x < (len/2); x++) { XAddress = (cesta10[z] - 1); z++; if(cesta10[z] == 1) { sendGfunction(); delay(waiting); sendGfunctionOff(); } else { sendRfunction(); delay(waiting); sendRfunctionOff(); } z++; delay(w_sekvence); } } } if (bouncer[40].onPressed()) { // sestaveni cesty 11 int len = sizeof(cesta11); if (len > 0) { byte z = 0; for (byte x = 0; x < (len/2); x++) { XAddress = (cesta11[z] - 1); z++; if(cesta11[z] == 1) { sendGfunction(); delay(waiting); sendGfunctionOff(); } else { sendRfunction(); delay(waiting); sendRfunctionOff(); } z++; delay(w_sekvence); } } } if (bouncer[41].onPressed()) { // sestaveni cesty 12 int len = sizeof(cesta12); if (len > 0) { byte z = 0; for (byte x = 0; x < (len/2); x++) { XAddress = (cesta12[z] - 1); z++; if(cesta12[z] == 1) { sendGfunction(); delay(waiting); sendGfunctionOff(); } else { sendRfunction(); delay(waiting); sendRfunctionOff(); } z++; delay(w_sekvence); } } } if (bouncer[42].onPressed()) { // sestaveni cesty 13 int len = sizeof(cesta13); if (len > 0) { byte z = 0; for (byte x = 0; x < (len/2); x++) { XAddress = (cesta13[z] - 1); z++; if(cesta13[z] == 1) { sendGfunction(); delay(waiting); sendGfunctionOff(); } else { sendRfunction(); delay(waiting); sendRfunctionOff(); } z++; delay(w_sekvence); } } } if (bouncer[43].onPressed()) { // sestaveni cesty 14 int len = sizeof(cesta14); if (len > 0) { byte z = 0; for (byte x = 0; x < (len/2); x++) { XAddress = (cesta14[z] - 1); z++; if(cesta14[z] == 1) { sendGfunction(); delay(waiting); sendGfunctionOff(); } else { sendRfunction(); delay(waiting); sendRfunctionOff(); } z++; delay(w_sekvence); } } } if (bouncer[44].onPressed()) { // sestaveni cesty 15 int len = sizeof(cesta15); if (len > 0) { byte z = 0; for (byte x = 0; x < (len/2); x++) { XAddress = (cesta15[z] - 1); z++; if(cesta15[z] == 1) { sendGfunction(); delay(waiting); sendGfunctionOff(); } else { sendRfunction(); delay(waiting); sendRfunctionOff(); } z++; delay(w_sekvence); } } } if (bouncer[45].onPressed()) { // sestaveni cesty 16 int len = sizeof(cesta16); if (len > 0) { byte z = 0; for (byte x = 0; x < (len/2); x++) { XAddress = (cesta16[z] - 1); z++; if(cesta16[z] == 1) { sendGfunction(); delay(waiting); sendGfunctionOff(); } else { sendRfunction(); delay(waiting); sendRfunctionOff(); } z++; delay(w_sekvence); } } } if (bouncer[46].onPressed()) { // sestaveni cesty17 int len = sizeof(cesta17); if (len > 0) { byte z = 0; for (byte x = 0; x < (len/2); x++) { XAddress = (cesta17[z] - 1); z++; if(cesta17[z] == 1) { sendGfunction(); delay(waiting); sendGfunctionOff(); } else { sendRfunction(); delay(waiting); sendRfunctionOff(); } z++; delay(w_sekvence); } } } if (bouncer[47].onPressed()) { // sestaveni cesty 18 int len = sizeof(cesta18); if (len > 0) { byte z = 0; for (byte x = 0; x < (len/2); x++) { XAddress = (cesta18[z] - 1); z++; if(cesta18[z] == 1) { sendGfunction(); delay(waiting); sendGfunctionOff(); } else { sendRfunction(); delay(waiting); sendRfunctionOff(); } z++; delay(w_sekvence); } } } if (bouncer[48].onPressed()) { // sestaveni cesty 19 int len = sizeof(cesta19); if (len > 0) { byte z = 0; for (byte x = 0; x < (len/2); x++) { XAddress = (cesta19[z] - 1); z++; if(cesta19[z] == 1) { sendGfunction(); delay(waiting); sendGfunctionOff(); } else { sendRfunction(); delay(waiting); sendRfunctionOff(); } z++; delay(w_sekvence); } } } if (bouncer[49].onPressed()) { // sestaveni cesty 20 int len = sizeof(cesta20); if (len > 0) { byte z = 0; for (byte x = 0; x < (len/2); x++) { XAddress = (cesta20[z] - 1); z++; if(cesta20[z] == 1) { sendGfunction(); delay(waiting); sendGfunctionOff(); } else { sendRfunction(); delay(waiting); sendRfunctionOff(); } z++; delay(w_sekvence); } } } if (bouncer[50].onPressed()) { // sestaveni cesty 21 int len = sizeof(cesta21); if (len > 0) { byte z = 0; for (byte x = 0; x < (len/2); x++) { XAddress = (cesta21[z] - 1); z++; if(cesta21[z] == 1) { sendGfunction(); delay(waiting); sendGfunctionOff(); } else { sendRfunction(); delay(waiting); sendRfunctionOff(); } z++; delay(w_sekvence); } } } if (bouncer[51].onPressed()) { // sestaveni cesty 22 int len = sizeof(cesta22); if (len > 0) { byte z = 0; for (byte x = 0; x < (len/2); x++) { XAddress = (cesta22[z] - 1); z++; if(cesta22[z] == 1) { sendGfunction(); delay(waiting); sendGfunctionOff(); } else { sendRfunction(); delay(waiting); sendRfunctionOff(); } z++; delay(w_sekvence); } } } if (bouncer[52].onPressed()) { // sestaveni cesty 23 int len = sizeof(cesta23); if (len > 0) { byte z = 0; for (byte x = 0; x < (len/2); x++) { XAddress = (cesta23[z] - 1); z++; if(cesta23[z] == 1) { sendGfunction(); delay(waiting); sendGfunctionOff(); } else { sendRfunction(); delay(waiting); sendRfunctionOff(); } z++; delay(w_sekvence); } } } if (bouncer[53].onPressed()) { // sestaveni cesty 24 int len = sizeof(cesta24); if (len > 0) { byte z = 0; for (byte x = 0; x < (len/2); x++) { XAddress = (cesta24[z] - 1); z++; if(cesta24[z] == 1) { sendGfunction(); delay(waiting); sendGfunctionOff(); } else { sendRfunction(); delay(waiting); sendRfunctionOff(); } z++; delay(w_sekvence); } } } if (bouncer[54].onPressed()) { // sestaveni cesty 25 int len = sizeof(cesta25); if (len > 0) { byte z = 0; for (byte x = 0; x < (len/2); x++) { XAddress = (cesta25[z] - 1); z++; if(cesta25[z] == 1) { sendGfunction(); delay(waiting); sendGfunctionOff(); } else { sendRfunction(); delay(waiting); sendRfunctionOff(); } z++; delay(w_sekvence); } } } if (bouncer[55].onPressed()) { // sestaveni cesty 26 int len = sizeof(cesta26); if (len > 0) { byte z = 0; for (byte x = 0; x < (len/2); x++) { XAddress = (cesta26[z] - 1); z++; if(cesta26[z] == 1) { sendGfunction(); delay(waiting); sendGfunctionOff(); } else { sendRfunction(); delay(waiting); sendRfunctionOff(); } z++; delay(w_sekvence); } } } if (bouncer[56].onPressed()) { // sestaveni cesty27 int len = sizeof(cesta27); if (len > 0) { byte z = 0; for (byte x = 0; x < (len/2); x++) { XAddress = (cesta27[z] - 1); z++; if(cesta27[z] == 1) { sendGfunction(); delay(waiting); sendGfunctionOff(); } else { sendRfunction(); delay(waiting); sendRfunctionOff(); } z++; delay(w_sekvence); } } } if (bouncer[57].onPressed()) { // sestaveni cesty 28 int len = sizeof(cesta28); if (len > 0) { byte z = 0; for (byte x = 0; x < (len/2); x++) { XAddress = (cesta28[z] - 1); z++; if(cesta28[z] == 1) { sendGfunction(); delay(waiting); sendGfunctionOff(); } else { sendRfunction(); delay(waiting); sendRfunctionOff(); } z++; delay(w_sekvence); } } } if (bouncer[58].onPressed()) { // sestaveni cesty 29 int len = sizeof(cesta29); if (len > 0) { byte z = 0; for (byte x = 0; x < (len/2); x++) { XAddress = (cesta29[z] - 1); z++; if(cesta29[z] == 1) { sendGfunction(); delay(waiting); sendGfunctionOff(); } else { sendRfunction(); delay(waiting); sendRfunctionOff(); } z++; delay(w_sekvence); } } } if (bouncer[59].onPressed()) { // sestaveni cesty 30 int len = sizeof(cesta30); if (len > 0) { byte z = 0; for (byte x = 0; x < (len/2); x++) { XAddress = (cesta30[z] - 1); z++; if(cesta30[z] == 1) { sendGfunction(); delay(waiting); sendGfunctionOff(); } else { sendRfunction(); delay(waiting); sendRfunctionOff(); } z++; delay(w_sekvence); } } } // snimani tlacitek ovladani stavu DCC if(buttonOn.onPressed()) { XpressNet.setPower(csNormal); #if SerialDEBUG Debug.println("Button 100 Normal run"); #endif } if(buttonOff.onPressed()) { XpressNet.setPower(csTrackVoltageOff); #if SerialDEBUG Debug.println("Button 101 Track Voltage Off"); #endif } if(buttonEme.onPressed()) { XpressNet.setPower(csEmergencyStop); #if SerialDEBUG Debug.println("Button 102 Emergency Stop"); #endif } unsigned long currentMillis = millis(); if(currentMillis - previousMillis > interval) { previousMillis = currentMillis; notifyXNetPower (XpressNet.getPower()); } } //-------------------------------------------------------------------------------------------- void notifyXNetPower (uint8_t State){ #if SerialDEBUG if (State != StateOld) { Debug.print("Power: "); Debug.println(State); StateOld = State; } #endif switch (State) { case csNormal: // Debug.println("ON"); digitalWrite(LEDC,LOW); // sviti zelena digitalWrite(LEDZ,HIGH); break; case csTrackVoltageOff: // Debug.println("OFF"); digitalWrite(LEDC,HIGH); // sviti cervena digitalWrite(LEDZ,LOW); break; case csEmergencyStop: // Debug.println("EmStop"); ledState = !ledState; // blika zelena digitalWrite(LEDC,LOW); digitalWrite(LEDZ,ledState); break; case csShortCircuit: // Debug.println("SHORT"); ledState = !ledState; // blika cervena digitalWrite(LEDZ,LOW); digitalWrite(LEDC,ledState); break; case csServiceMode: // Debug.println("PROG"); digitalWrite(LEDZ,LOW); // sviti cervena digitalWrite(LEDC,HIGH); break; case 255: // Debug.println("ERROR"); ledState = !ledState; // blikaji obe digitalWrite(LEDZ,ledState); digitalWrite(LEDC,ledState); break; default: // Debug.println("OTHER"); ledState = !ledState; // blika cervena digitalWrite(LEDZ,LOW); digitalWrite(LEDC,ledState); break; } } void sendGfunction() { XpressNet.setTrntPos(0, XAddress, B1000); #if SerialDEBUG Debug.print("Button Green ON, Address: "); Debug.println(XAddress); #endif } void sendGfunctionOff() { XpressNet.setTrntPos(0, XAddress, B0000); #if SerialDEBUG Debug.println("Button Green OFF"); #endif } void sendRfunction() { XpressNet.setTrntPos(0, XAddress, B1001); #if SerialDEBUG Debug.print("Button Red ON, Address: "); Debug.println(XAddress); #endif } void sendRfunctionOff() { XpressNet.setTrntPos(0, XAddress, B0001); #if SerialDEBUG Debug.println("Button Red OFF"); #endif } //-------------------------------------------------------------------------------------------- //-------------------------------------------------------------------------------------------- #if SerialDEBUG int freeRam () { extern int __heap_start, *__brkval; int v; return (int) &v - (__brkval == 0 ? (int) &__heap_start : (int) __brkval); } #endif |
Návod na stavbu shieldu a způsob nahraní programu do Arduina pak najdete v předešlém článku:
Arduino TCO – ovládací pult s Arduinem na XpressNet
Také bych zde rád dal poděkování pro pana Zdeňka Hovorku, který mi pomohl na svém kolejišti s otestováním obslužného programu.
————————————————————————————————————————————————-
Soubory ke stažení:

- Titul : TCO pult v0.30 10 cest
Název souboru : TCO_pult_v0_30.ino (13 kB)
- Titul : TCO pult v0.30 30 cest
Název souboru : TCO_pult_v0_30_30.ino (21 kB)
————————————————————————————————————————————————-
______________________________________________________________________________________
______________________________________________________________________________________